During the operation of robots, various unexpected situations may arise, including machine malfunctions, external disturbances, unknown obstacles, etc. To ensure that robots can respond to various unexpected situations, we need to take some measures to ensure safe and efficient operation, which requires the use of the IO port of the driver for emergency stop control. Usually, we connect the signal of the emergency stop button to the driver to immediately stop the operation of the robot in case of emergency.
The operation steps for emergency stop using the IO port of servo driver are as follows:
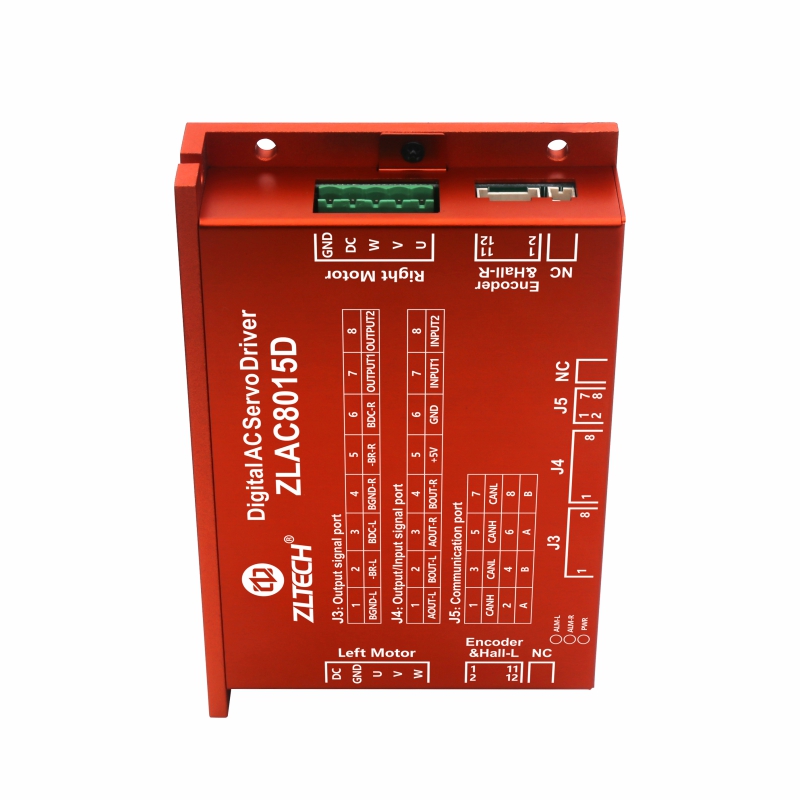
1.Hardware connection: Emergency stop button wiring:
Connect the two terminals of the emergency stop button to the corresponding input points of servo driver IO port. This is usually a normally closed contact, which opens when the emergency stop button is pressed, sending an emergency stop signal to servo driver.
2.Software settings: Servo driver settings
2.1 According to the configuration software or manual of servo driver, set the corresponding IO port as emergency stop input.
2.2 Configure the behavior of servo driver when receiving an emergency stop signal, such as stopping motor operation, cutting off output, etc.
3.Implementation of emergency stop logic
3.1Signal detection: The driver continuously monitors the status of the emergency stop input signal.
3.2Emergency stop:
- Once an emergency stop signal is detected (i.e. the emergency stop button is pressed), the driver or PLC immediately executes the emergency stop program.
- This may include operations such as stopping the motor, turning off the power, and releasing the brake.
3.3 Reset operation:
- After resolving the emergency stop event, the system usually needs to be manually reset to continue normal operation.
- You can add a reset button on servo drive to initiate a system reset by pressing this button. It can also be reset by sending instructions to servo driver.
In summary, using the IO port of the driver for emergency stop control requires a comprehensive consideration of hardware connection, software settings, and implementation of emergency stop logic. Through reasonable configuration and programming, it can be ensured that the equipment can be quickly stopped in emergency situations, thereby protecting the safety of operators and equipment. Shenzhen Zhongling Technology Co., Ltd servo drivers are designed specifically for the robotics industry and can meet the needs of 24V-48V up to 60A. They are available in single channel and dual channel options and support RS485 and CANOPEN communication. In addition to the IO port emergency stop function, Shenzhen Zhongling Technology Co., Ltd servo drivers also support alarm PWM processing, parking mode, external brake control, etc., which can meet the requirements of customers in various usage scenarios. More information about Shenzhen Zhongling Technology Co., Ltd servo drivers can be found at www.zlingkj.com.
Mailbox:[email protected]
Office address:303, 3rd Floor, Building B, Fenghuang Zhigu, Tiezi Road, Xixiang Street, Bao'an District, Shenzhen
Factory address:6th Floor, Building D, Changxing Zhigu Industrial Park, No. 16 Changlong Xinfeng Street, Huangjiang Town, Dongguan City