Service robots usually refer to dirty, boring, remote, dangerous or repetitive jobs that can replace people, including housework. They are usually autonomous or operated by a built-in control system with manual control options. The definition of "service robot" has no strict technical definition. The International Organization for Standardization defines "service robots" as "robots that perform useful tasks for human beings or robotic equipment other than industrial automation applications"
Service robots have a wide range of applications, mainly engaged in maintenance, repair, transportation, cleaning, security, rescue, monitoring and other work. After several years' collection and sorting, the International Federation of Robotics gave a preliminary definition of service robot: service robot is a kind of semi-autonomous or fully autonomous robot, which can complete the service work beneficial to human health, but does not include the equipment engaged in production.

The servo hub motor of the service robot chassis is the power core of the service robot. At present, there are generally two ways to use the chassis motor of the service robot.
The first is the structure of traditional servo motor+planetary reducer+wheel, which adopts the structure of amplifying the torque of servo motor through reducer, so that even if the motor is outputting large torque, its internal current does not need to be too high, and it can output large torque, which is very suitable for AGV and AMR industries with heavy load, but it will be complicated in structure and has little price advantage when it is used to serve the robot industry. The disadvantages of this kind of hub motor are also obvious, such as complex structure, high cost and large volume, which are unavoidable shortcomings of this kind of hub motor at present, and also limit the development of AGV industry to some extent.
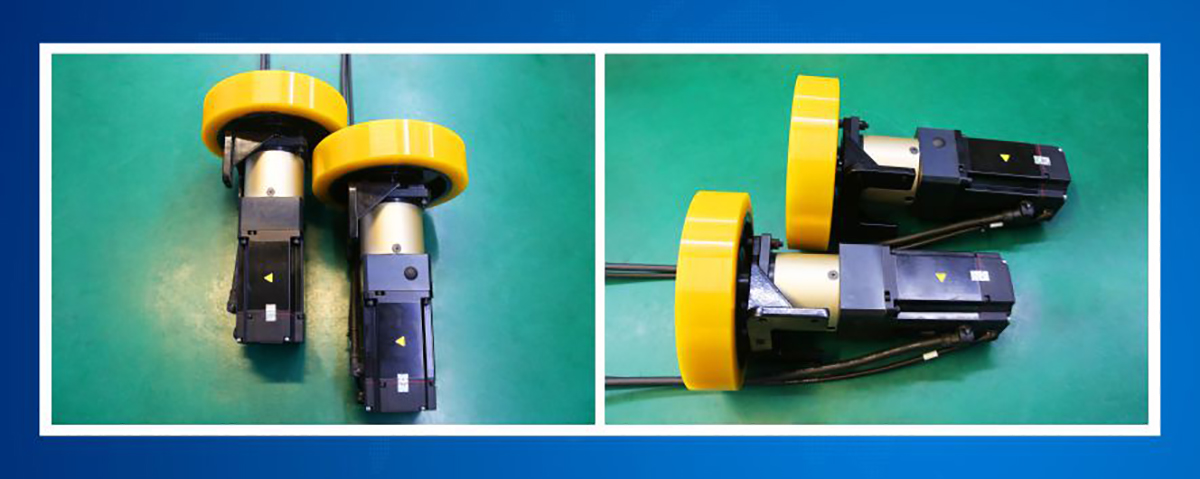
The second type is the toothless hub motor with external rotor, which is basically composed of stator+encoder+shaft+magnet+steel ring+cover+tire.
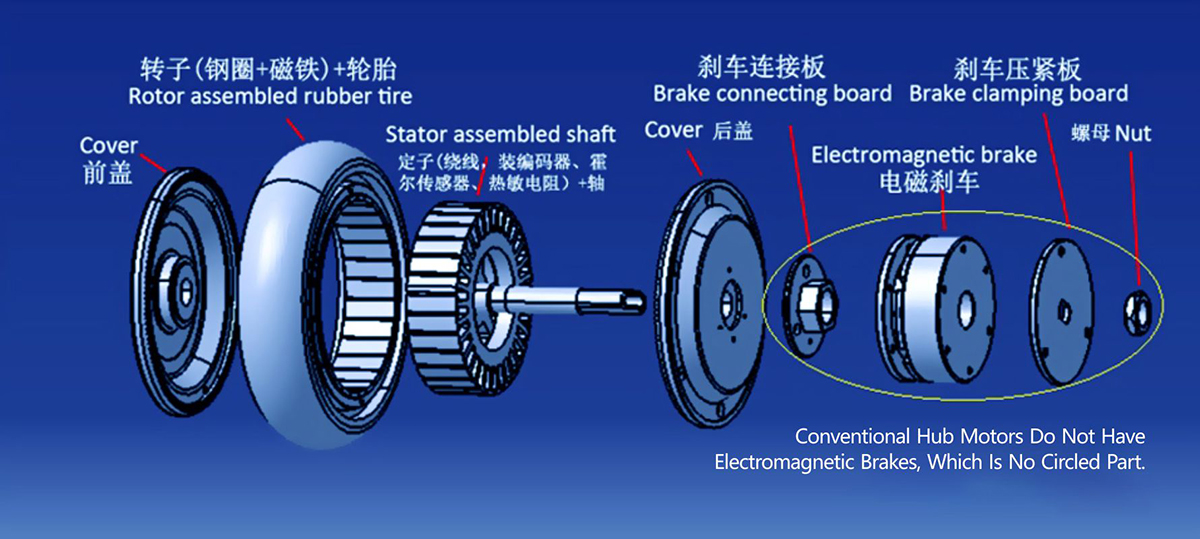
The in-wheel motor of Zhongling Technology is mainly composed of outer cover (front cover and back cover), rotor (steel ring and magnet), tire, stator (winding, encoder, Hall sensor and thermistor) and shaft.
Conventional in-wheel motors do not have electromagnetic brakes. In addition to the above accessories, in-wheel motors with electromagnetic brakes also include brake pressing plates, electromagnetic brakes, brake pressing plates and nuts. This kind of DC brushless hub motor is limited in the design range of torque constant due to its structural characteristics, which makes the motor need to output high current to output high torque.
The in-wheel motor of Shenzhen Zhongling Technology is designed based on the external rotor DC brushless toothless hub, with a wide size range from 4.0 inches to 16.0 inches. Zhongling's hub motor has the advantages of small size, high precision, large load, simple structure, easy installation, stable low-speed operation, fast dynamic response, closed-loop operation (built-in Hall and encoder), etc. In addition, ZLTECH's hub is fully integrated with 1024-line optical encoder and 4096-line magnetic encoder, and the accuracy of each rotation is as high as 4096PPR and 16384 revolutions respectively, which is very suitable for mobile robots with a load of less than 300kg, such as food delivery. Zhongling Technology will develop and apply new technologies with the concept of openness and innovation, and promote the research and development of service robot motion chassis that can adapt to various environments.

Mailbox:[email protected]
Office address:303, 3rd Floor, Building B, Fenghuang Zhigu, Tiezi Road, Xixiang Street, Bao'an District, Shenzhen
Factory address:6th Floor, Building D, Changxing Zhigu Industrial Park, No. 16 Changlong Xinfeng Street, Huangjiang Town, Dongguan City